Scherung (Mechanik)

Eine Scherung tritt in der Mechanik zwischen zwei Ebenen auf, die durch ein Kräftepaar aus Schub- bzw. Scherkräften gegeneinander parallel verschoben werden, sodass der zwischen den Ebenen liegende Bereich geschert wird und Schubverzerrungen oder Gleitungen γ auftreten, siehe Abbildung 1.
Die Scherkräfte leiten in das Material eine Schub- oder Scherspannung τ ein, die bei kleinen Deformationen und linearer Elastizität proportional zur Gleitung sind: τ=G·γ, wo G der Schubmodul ist.
In der Kontinuumsmechanik wird Scherung und Schubverzerrung synonym benutzt und in der technischen Mechanik wird unter Scherung auch Scherbelastung verstanden. Ersteres wird im Abschnitt Kinematik, letzteres im Abschnitt Dynamik behandelt. Ein einleitender Abschnitt behandelt die Phänomenologie der Scherung.
Von reiner Scherung wird gesprochen, wenn es ein Bezugssystem gibt, in dem keine Normaldehnungen oder keine Normalspannungen vorkommen,[L 2]:16[L 3]:71 was auch bei koaxialer Verformung wie in Abbildungen 3, 5 und 6 vorkommt.
Scherung tritt u. a. bei der Torsion oder der Querkraftbeanspruchung von Trägern auf, ist aber auch in viskosen Fluiden (Flüssigkeiten oder Gase) bedeutsam, siehe #Scherung von Fluiden.
Einführung
[Bearbeiten | Quelltext bearbeiten]Die Scherung von Flüssigkeiten und Gasen wird im Abschnitt #Scherung von Fluiden behandelt.
Makroskopische Betrachtung
[Bearbeiten | Quelltext bearbeiten]
Zwei an einem Körper angreifende, parallel zueinander in entgegengesetzter Richtung wirkende Kräfte bewirken eine Scherung des Körpers[L 4] und heißen daher Scherkräfte, siehe Abbildung 1. Bei einer Torsion wie in Abbildung 2 werden parallel zueinander liegende Querschnittsflächen gegeneinander verdreht, was auch eine Scherung darstellt. Die Länge des Gegenstands sowie sein Querschnitt bleiben dabei idealerweise unverändert. Die scherenden Kräfte wirken stets tangential zur Körperoberfläche.[L 1]
Typische Beispiele für Scherkräfte kommen in Niet- und Bolzenverbindungen vor, siehe Abscherung (Statik). Die Schneidekanten von Scheren trennen das zu zerschneidende Material durch Scherung (Scherschneiden).
Mikroskopische Betrachtung
[Bearbeiten | Quelltext bearbeiten]
Die Festigkeitslehre und Kontinuumsmechanik interessieren sich für die lokalen Verhältnisse in einem Körper unter Scherung, denn dort entscheidet sich, ob sich der Körper z. B. elastisch oder plastisch verformt.
Die lokalen Verhältnisse werden zugänglich, wenn der Körper gedanklich zerschnitten wird und so an der Schnittebene Schnittspannungen (Vektoren mit der Dimension Kraft pro Flächeninhalt) entstehen, die von der Orientierung der Schnittebene abhängen. Die Schnittebene kann in einem Punkt so gelegt werden, dass in ihr die Schubspannung, die definitionsgemäß parallel zur Schnittebene wirkt, maximal ist (Hauptschubspannung); Normalspannungen wirken im Gegensatz dazu senkrecht zur Schnittebene.
Die in der makroskopischen Betrachtung herangezogenen Belastungen führen zu Schubspannungen, die im Vergleich zu den Hauptnormalspannungen (kurz Hauptspannungen) maximal, nämlich betraglich gleich sind. Hier sind zwei Hauptspannungen entgegengesetzt gleich groß (siehe auch das #Beispiel unten), und der Mittelpunkt des Mohr’schen Spannungskreises liegt im Spannungsraum im Ursprung, sodass die maximale Schubspannung betraglich genauso groß ist wie die Hauptspannungen. Am Mohr’schen Spannungskreis lässt sich auch ablesen, dass die maximalen Schubspannungen im 45°-Winkel zu den Hauptspannungsrichtungen auftreten, die wiederum senkrecht zu Schnittebenen sind, in denen keine Schubspannungen vorkommen, siehe Abbildung 3.
Sind zwei Hauptspannungen gleich, dann degeneriert der Mohr’sche Spannungskreis zu einem Punkt. Sind alle drei Hauptspannungen gleich, dann befindet sich der materielle Punkt unter allseitigem Druck/Zug, und es treten im isotropen Material in keiner Ebene Schubspannungen auf. In allen anderen Fällen gibt es Schnittebenen, in denen eine maximale und nicht verschwindende Scherbelastung stattfindet. Monoklin und triklin anisotrope Stoffe erfahren unter allseitigem Druck auch Schubverformungen.
Die in der makroskopischen Betrachtung vorgestellten Fälle stellen aus Sicht der Schubspannungshypothese ungünstigste Belastungen dar, denn nach dieser Hypothese sind die Schubspannungen für das Versagen eines Werkstoffs verantwortlich. Demzufolge lohnt es sich, den Schubanteilen besondere Aufmerksamkeit zu schenken und das Bezugssystem entsprechend auszurichten.
Kinematik
[Bearbeiten | Quelltext bearbeiten]Zur Veranschaulichung einer Scherung kann man sich ein Buch vorstellen: verschiebt man die Buchdeckel parallel gegeneinander, bilden Buchrücken und Seitenstapel einen Winkel ungleich 90°. Die Abweichung vom rechten Winkel ist die Schubverzerrung oder Gleitung γ.
Kleine Verformungen
[Bearbeiten | Quelltext bearbeiten]Kartesische Koordinaten
[Bearbeiten | Quelltext bearbeiten]
Bei einer ebenen Verformung hängen die Verschiebungen u(x,y) und v(x,y) in x- bzw. y-Richtung vom Ort ab, der mit der x- und y-Koordinate eines kartesischen Koordinatensystems parametrisiert sein kann. Dann gilt bei kleinen Verformungen:[L 3]:66

Zur Herleitung wird in der xy-Ebene ein (infinitesimal) kleines Rechteck mit Breite dx und Höhe dy betrachtet, ABCD, das in ein Viereck A'B'C'D' verformt wird, siehe Abbildung 4. Anders als dort dargestellt sollen die Verformungen klein ausfallen, sodass die Verschiebungen und ihre Ableitungen klein sind. Das Koordinatensystem wird so gelegt, dass dessen x- und y-Achse in Richtung der Seiten AB bzw. AD weisen.
Der Winkel γ ist, wie dem Bild zu entnehmen ist, die Summe der Winkel α und β. Die Ecken A, B und D verschieben sich nach

wo die rechten Näherungen den nach dem linearen Glied abgebrochenen Taylorreihen entsprechen, die sich der Funktion also linear angleichen. Damit kann der Tangens von α ausgedrückt werden:

Hier wurde der zweite Summand im Nenner als Ableitung nach Voraussetzung vernachlässigt. Entsprechend berechnet sich


und mit der Kleinwinkelnäherung tanα≈α:

- Reine Scherung
-
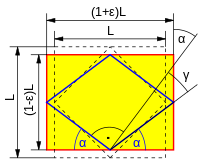 Abb. 5: Kleine Querdehnung ε
Abb. 5: Kleine Querdehnung ε -
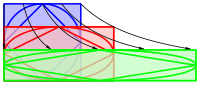 Abb. 6: Große Querdehnung
Abb. 6: Große Querdehnung



Bei der Verformung eines Quadrats in ein Rechteck tritt auch eine Schubverzerrung auf, siehe Abbildung 5. Bei kleinem ε ist dort γ≈2ε. Denn aus dem Bild ist γ=90°-2α oder α=45°-γ/2 sowie abzulesen. Mit dem Additionstheorem und tan(45°)=1 folgt



und mit der Kleinwinkelnäherung besagtes γ≈2ε. Die Verformung ist in erster Ordnung volumenerhaltend, denn die Fläche des gelben Rechtecks ist
- A = (1+ε)·L·(1-ε)·L = (1-ε2)·L2 ≈ L2
und damit gleich dem des ursprünglichen Quadrats. Bei entsprechenden großen aber volumenerhaltenden Verformungen der Abbildung 6 ist die Querdehnung in der Ebene gleich , und die Partikel des Körpers verschieben sich auf schwarz skizzierten, gekrümmten Bahnen was in den Geowissenschaften #Reine Scherung (pure shear) genannt wird.
Zylinderkoordinaten
[Bearbeiten | Quelltext bearbeiten]In Zylinderkoordinaten mit radialer Koordinate ρ, Azimut φ und Höhe z über der ρφ-Ebene lauten die Schubverzerrungen[L 5]

Kugelkoordinaten
[Bearbeiten | Quelltext bearbeiten]In Kugelkoordinaten mit Abstand r vom Ursprung, Zenitwinkel ϑ und Azimut φ lauten die Schubverzerrungen[L 5]

mit den Winkelfunktionen Sinus sin und Kotangens cot.
Große Verformungen
[Bearbeiten | Quelltext bearbeiten]
Bei großen Verformungen wird eine lokale Verformung wie in Abbildung 7 betrachtet. Zwei sich im Referenzzustand (oberer Bildteil) kreuzende materielle Linien (die man sich als oberflächig eingeritzte Linien vorstellen kann) schließen einen rechten Winkel ein, der zwischen ihren Tangentenvektoren und gemessen wird. Wie üblich werden die x- und y-Koordinaten nach dem Schema x→1 und y→2 durchnummeriert. Im Zuge einer Deformation – beschrieben mit der Bewegungsfunktion – ändert sich der Winkel γ zwischen den Tangentenvektoren gemäß




mit
- dem Frobenius-Skalarprodukt „“ von Vektoren
- dem einheitenfreien Green-Lagrange’sche Verzerrungstensor E, dessen Komponenten sich auf das im Referenzzustand von den Vektoren gebildete Basissystem beziehen
- der Schubverzerrung in der 1-2-Ebene
- den Normaldehnungen und , die in der 1- bzw. 2-Richtung auftreten.








Im Fall kleiner Verzerrungen geht der Green-Lagrange’sche Verzerrungstensor in den linearisierten Verzerrungstensor über, kann (Kleinwinkelnäherung) und der Nenner im obigen Bruch gleich eins gesetzt werden, mit dem Resultat:



Die Komponenten beziehen sich auf ein kartesisches Koordinatensystem,
- das parallel zu den Vektoren ausgerichtet ist,
- in dem X1,2 die Koordinaten,
- u1,2 die Verschiebungen und
- ε12 die Schubverzerrung sind.
Die Schergeschwindigkeit berechnet sich im Zustand γ=0° als:[F 1]


mit


Hier werden die zueinander orthogonalen Tangentenvektoren also im deformierten Zustand ausgewählt.

Die Komponenten beziehen sich auf ein kartesisches Koordinatensystem,
- das nun parallel zu den Vektoren ausgerichtet ist,
- in dem x1,2 die Koordinaten,
- v1,2 die Geschwindigkeiten und
- d12 die Schubverzerrungsgeschwindigkeit sind.
Bei kleinen Verzerrungen ist , und die Schergeschwindigkeit lautet:


Scherung in der Geologie
[Bearbeiten | Quelltext bearbeiten]
In der Geologie werden hauptsächlich zwei Extremfälle der Scherung unterschieden, mithilfe deren Kombination viele Verformungen (beispielsweise transpressive oder transtensive Verwerfungen) betrachtet werden können.
Reine Scherung (pure shear)
[Bearbeiten | Quelltext bearbeiten]Die reine Scherung, auch koaxiale Scherung oder reine Kompression, bezeichnet den Idealfall koaxialer Verformung wie in Abbildung 6,[L 6] aus dem eine dreidimensionale homogene Abflachung des Körpers resultiert.[L 7] Es ist ein Beispiel für eine drehungsfreie Verformung, bei der der Körper in einer Richtung verlängert und zeitgleich senkrecht verkürzt wird.
Einfache Scherung (simple shear)
[Bearbeiten | Quelltext bearbeiten]Die einfach Scherung, auch nicht-koaxiale Scherung wie in Abbildung 1, bezeichnet den Extremfall der nicht-koaxialen Verformung,[L 6] bei dem parallele Ebenen in einem Material parallel bleiben und einen konstanten Abstand beibehalten, während sie sich relativ zueinander verschieben.
Dynamik
[Bearbeiten | Quelltext bearbeiten]Scherung von Festkörpern
[Bearbeiten | Quelltext bearbeiten]Eine Schubbelastung ist eine Kraft oder ein Moment, bei denen der belastete Körper zumindest lokal eine Scherbewegung ausführt. Diese äußere Belastung setzt sich im Körper in Spannungen um, insbesondere in Schubspannungen.
Scherbelastung tritt nicht nur bei äußerer Belastung auf, sondern z. B. auch
- bei thermischer Belastung von miteinander flächig verbundenen Körpern, die unterschiedliche Wärmeausdehnungskoeffizienten besitzen,
- aufgrund latenter Spannungen bei inhomogener Erstarrung, z. B. beim Schweißen, oder
- bei Beschichtungen, die nach der Aufbringung anders schrumpfen als das Grundmaterial.
Bei der Scherung – oder allgemein bei einer Schubbelastung – stehen die Schubspannung τ und die Schubverzerrung oder Gleitung γ im geometrisch linearen Bereich und bei linearer Elastizität in der Beziehung
- τ = G γ.
Die Proportionalitätskonstante G ist der Schubmodul (auch: Scher- oder Gleitmodul).
Die Schubspannung wird bei der Scherung auch Scherspannung genannt und hat – wie der Schubmodul – die Dimension Kraft pro Fläche. Die SI-Einheit der Schubspannung ist damit das Pascal (Pa), also N/m² – Newton pro Quadratmeter.
Lokal werden bei einer Scherung im elastischen Bereich im Körper materielle Flächen relativ zueinander, reversibel, parallel verschoben. Die Fläche kann sich dabei verwölben, wie es z. B. bei der Torsion eines nicht kreisrunden Stabes oder der Querkraftbelastung eines Trägers passiert.
Oberhalb des elastischen Bereichs bis zum Erreichen der Scherfestigkeit verformen sich duktile Materialien plastisch, worauf im Folgenden[L 8] eingegangen wird.
Bei Überschreitung der Scherfestigkeit wird das Werkstück abgeschert (siehe die Beispiele zum Torsionsbruch).
Kristalline Werkstoffe
[Bearbeiten | Quelltext bearbeiten]Übersteigt die Scherbelastung die Elastizitätsgrenze, so kommt es in duktilen kristallinen Werkstoffen – insbesondere Metallen – zu Versetzungsbewegungen.
In einem kristallinen Werkstoff werden bei der Scherung Kristallteile gegeneinander verschoben. Die Ebene, die die Kristallteile voneinander trennt, ist die Gleitebene, die gemeinsam mit der Gleitrichtung das Gleitsystem bildet.
Im Beispiel mit dem Buch wären die Gleitebenen die Buchseiten, die nun in der Gleitrichtung senkrecht zum Buchrücken in der Papierebene aufeinander abgleiten.
Ist der Normalenvektor der Gleitebene und die Gleitrichtung in der Ebene, dann ist die Schubspannung im Gleitsystem (GS) durch den Spannungstensor gegeben:




mit

Überschreitet die Schubspannung im Gleitsystem die kritische Schubspannung , so gleiten die Atome beiderseits der Gleitebene aneinander ab und es kommt zu plastischer Verformung.


Polykristalline Werkstoffe
[Bearbeiten | Quelltext bearbeiten]In polykristallinen, isotropen Werkstoffen wechselt die Kristallorientierung mit den Kristallkörnern, deren Verformungen sich gegenseitig behindern können. Dadurch steigt die Schubfließgrenze an. Der Proportionalitätsfaktor zwischen der Schubfließgrenze und der kritischen Schubspannung ist der Taylor-Faktor M:


Der Taylor-Faktor berechnet sich aus den statistischen Eigenschaften der Kristallkörner im Polykristall. Bei kubisch flächenzentriertem Gitter ist er M=3,1 und bei kubisch raumzentriertem Gitter M=2,9.
Thermoplaste
[Bearbeiten | Quelltext bearbeiten]Thermoplaste können sich plastisch verformen, indem sich die Kettenmoleküle, aus denen sie bestehen, lokal strecken. Dadurch entstehen – insbesondere unter Druck – Scherbänder, die in einem Winkel von 45° bis 60° zur Belastungsrichtung orientiert sind, wo lokalisiert große plastische Verformungen von 100 % und mehr auftreten; abseits davon sind die Verformungen aber gering.
Scherung von Fluiden
[Bearbeiten | Quelltext bearbeiten]Scherung ist auch in Fluiden bedeutsam, die Schergeschwindigkeiten in ihnen berechnen sich wie im Abschnitt #Große Verformungen in der Kinematik geschildert.
Reibungsfreie Fluide
[Bearbeiten | Quelltext bearbeiten]In reibungsfreien Flüssigkeiten und Gasen führen die Schergeschwindigkeiten nicht zu Schubspannungen.
Newtonsche Fluide
[Bearbeiten | Quelltext bearbeiten]
Die in der Strömungsmechanik zumeist betrachteten Fluide sind die newtonschen Fluide, deren Geschwindigkeitsfeld den Navier-Stokes-Gleichungen gehorcht. Das Materialmodell für das newtonsche Fluid lautet:

Darin sind
- p der im Allgemeinen von der Dichte ρ abhängige Druck
- 1 der Einheitstensor
- μ die zweite und λ die erste Lamé-Konstante
- Sp die Spur.
Die Schubspannungen sind also mit 2μd proportional zum o. g. Verzerrungsgeschwindigkeitstensor d, was sich makroskopisch als Viskosität bemerkbar macht.
An Wänden, wo die Haftbedingung keine wandparallele Bewegung des Fluids an der Wand zulässt, führt die Schubspannung zur Ausbildung einer Grenzschicht, in der sich die Geschwindigkeit an die Geschwindigkeit im Hauptstrom angleicht, siehe Abbildung 9.
Strömt das Fluid in x-Richtung parallel zur Wand und weist die Wandnormale in y-Richtung, dann lautet die Schubspannung im Abstand von einer ebenen Wand:


denn der Term mit der Geschwindigkeit senkrecht zur Wand kann hier vernachlässigt werden.

Insbesondere ist die Wandschubspannung definiert durch

Nicht-Newtonsche Fluide
[Bearbeiten | Quelltext bearbeiten]Nicht-newtonsche Fluide zeigen eine nichtlineare Abhängigkeit der Schubspannungen von den Schergeschwindigkeiten.
Beispiel
[Bearbeiten | Quelltext bearbeiten]
In der xy-Ebene erfahren die Punkte eines Einheitsquadrats mit die Verschiebung
![{\displaystyle (x,y)\in [0,1]\times [0,1]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e6d95b074f61bc9fac67a16e74107ccf025eee4e)

Der Parameter γ ist die Gleitung und φ bewirkt eine Drehung. Aus Ableitungen nach dem Ort berechnet sich der linearisierte Verzerrungstensor

der – anders als in Abbildung 10 dargestellt – nur zulässig ist bei Mit dem Hooke’schen Gesetz ergibt sich der Spannungstensor


in Abhängigkeit vom Schubmodul G und der ersten Lamé-Konstanten λ. Der Operator Sp bildet die Summe der Diagonalelemente (Spur) und ist der Einheitstensor. Die Schubspannungen haben die Größe Der Verzerrungs- und Spannungstensor besitzen hier – im Rahmen der geometrisch linearen Betrachtung – keine Normalkomponenten.


In Schnittebenen mit Normalenvektoren

treten keine Schubspannungen auf, weil die Schnittspannungsvektoren genau in Normalenrichtung weisen ( sind Hauptspannungen und sind die dazugehörenden Hauptspannungsrichtungen.)



Der linearisierte Verzerrungstensor ist der symmetrische Anteil des Verschiebungsgradienten

Durch Addition des nicht linearen Anteils

zum linearisierten Verzerrungstensor ergibt sich der Green-Lagrange’sche Verzerrungstensor

Bei der Scherung eines Quadrats zu einem flächengleichen Parallelogramm treten deshalb bei großer Scherbewegung Normaldehnungen auf, siehe Poynting-Effekt.
Siehe auch
[Bearbeiten | Quelltext bearbeiten]Festkörper:
Fluide:
Literatur
[Bearbeiten | Quelltext bearbeiten]- Herbert Balke: Einführung in die Technische Mechanik. Festigkeitslehre. 3. Auflage. Springer-Vieweg, 2008, ISBN 978-3-642-40980-6.
- Holm Altenbach: Kontinuumsmechanik: Einführung in die materialunabhängigen und materialabhängigen Gleichungen. Springer, 2012, ISBN 3-642-24119-0.
Anmerkungen
[Bearbeiten | Quelltext bearbeiten]- ↑ Die Groß- und Kleinschreibung der Variablen ist zu beachten: Variablen in Großbuchstaben beziehen sich auf den Referenzzustand und solche in Kleinbuchstaben auf den aktuellen Zustand, der gegenüber dem Referenzzustand stark deformiert und verdreht sein kann.
Einzelnachweise
[Bearbeiten | Quelltext bearbeiten]- ↑ a b Bernhard Grotz: Mechanik der Festkörper. 30. Oktober 2015, abgerufen am 3. November 2015.
- ↑ H. Balke: Einführung in die Technische Mechanik. Festigkeitslehre. 3. Auflage. Springer-Vieweg, 2014, ISBN 978-3-642-40980-6.
- ↑ a b D. Gross, W. Hauger, J. Schröder, W. A. Wall: Technische Mechanik. Elastostatik. Band 2. Springer-Verlag, Heidelberg 2014, ISBN 978-3-642-40965-3, doi:10.1007/978-3-642-40966-0_6 (Verzerrungszustand, Elastizitätsgesetz).
- ↑ Bedeutungsübersicht: Scherung (Mechanik). Duden online, abgerufen am 2. November 2015.
- ↑ a b Martin H. Sadd: Elasticity – Theory, applications and numerics. Elsevier Butterworth-Heinemann, 2005, ISBN 0-12-605811-3, S. 42 f.
- ↑ a b Scherung. In: Lexikon der Geowissenschaften. Spektrum, abgerufen am 5. Februar 2022.
- ↑ Reish, Nathaniel E.; Gary H. Girty: Definition and Mathematics of Pure Shear. San Diego State University Department of Geological Sciences, abgerufen am 5. Februar 2022.
- ↑ J. Rösler, H. Harders, M. Bäker: Mechanisches Verhalten der Werkstoffe. 4. Auflage. Springer-Vieweg, 2012, ISBN 978-3-8348-1818-8.